
See list attachedApril 1, 196969-PA-T-52APA/Chief, Apollo Data Priority CoordinationPGNCS operations while on the lunar surface
During our March 27 Lunar Surface Mission Techniques meeting I think we finally settled how we think the PGNCS should be operated. How many times have I said that before? This memo is to broadcast a few new items that might be of general interest.
MIT has recently made a significant change in the PGNCS lunar surface alignment program (P57). They have added a new alternative governing the orientation to which the IMU can be aligned. Specifically, before this change there were only two alternatives – a “preferred” align- ment associated with lift-off time computed by the LGC and an align- ment to a REFSMMAT uplinked from the Mission Control Center. The new alternative provides the capability of an alignment to the stored REFSMMAT – that is, the same REFSMMAT to which the IMU was aligned the last time. This program change significantly simplifies crew procedures and since it will be used several times during the lunar stay you should be aware of it.
We have finally converged on the sequence of P57 options to be used on the lunar surface. They are described in considerable detail in the attachment. Briefly the sequence is:
a. A gravity alignment (Option 1) to determine the direction of the gravity vector.
b. An AOT star alignment (Option 2) to establish an inertial reference which can be used with the gravity vector to determine the LM's position on the lunar surface. This alignment will also provide a drift check on the IMU since the pre-DOI AOT star alignment.
c. A gravity and star alignment (Option 3) in preparation for lift-off at the end of two hours stay, if that is necessary, and to initialize the system for a sustained IMU drift check.
d. Two Option 3's in the nominal ascent countdown. The first, which completes the drift check, also sets up the system for the rendezvous radar tracking of the command module two hours before the lift-off. The second supports the Ascent itself.
This sequence not only provides all of the data needed to support the actual operation but also exercises all of the options which makes the engineers happy. The consensus was that we have trimmed this activity just about to a minimum and it should be fairly easy to include in the crew timeline.
Flight Dynamics' flight controllers were requested to select the stars to be used for the lunar surface alignment on the nominal G mission as soon as possible.
It is our understanding and recommendation that the IMU will remain powered up throughout the lunar stay. We should emphasize that it is also necessary that the LGC remain powered up as in order to main- tain gyro compensation in the IMU as well as to provide the downlink data continuously to the Mission Control Center. Apparently there was some uncertainty about this.
After considerable discussion it was decided that our best course of action is to update both the LM position on the lunar surface (RLS) and command module state vector in the LGC during the first two hours on the lunar surface to support an ascent at that time, if it is necessary. The RLS will be based on the AOT alignment and gravity vector data as well as crew observations during the landing and perhaps on data gathered prior to DOI. (The exact manner in which the Mission Control Center will do this job is the subject of a meeting next week.) The CSM state vector will be the best MSFN estimate at the time of the update. This is such an obvious choice you must wonder how we wasted our time. The only point we were concerned with was making sure that the RLS and CSM vectors were compatible enough to support ascent guidance at the end of a two hour stay. We feel that this technique will probably provide that, but we may want to reconsider after obtaining F mission experience.
In addition to the Data Select business noted above about how to establish RLS, we are also scheduling a meeting specifically to discuss the AGS operation on the lunar surface next week. After incorporating the results of those meetings into the Mission Techniques Document for Lunar Surface Operation, we will review and finally publish that docu- ment a couple of weeks later. Hopefully, at that time this mission phase should be fairly well closed out.
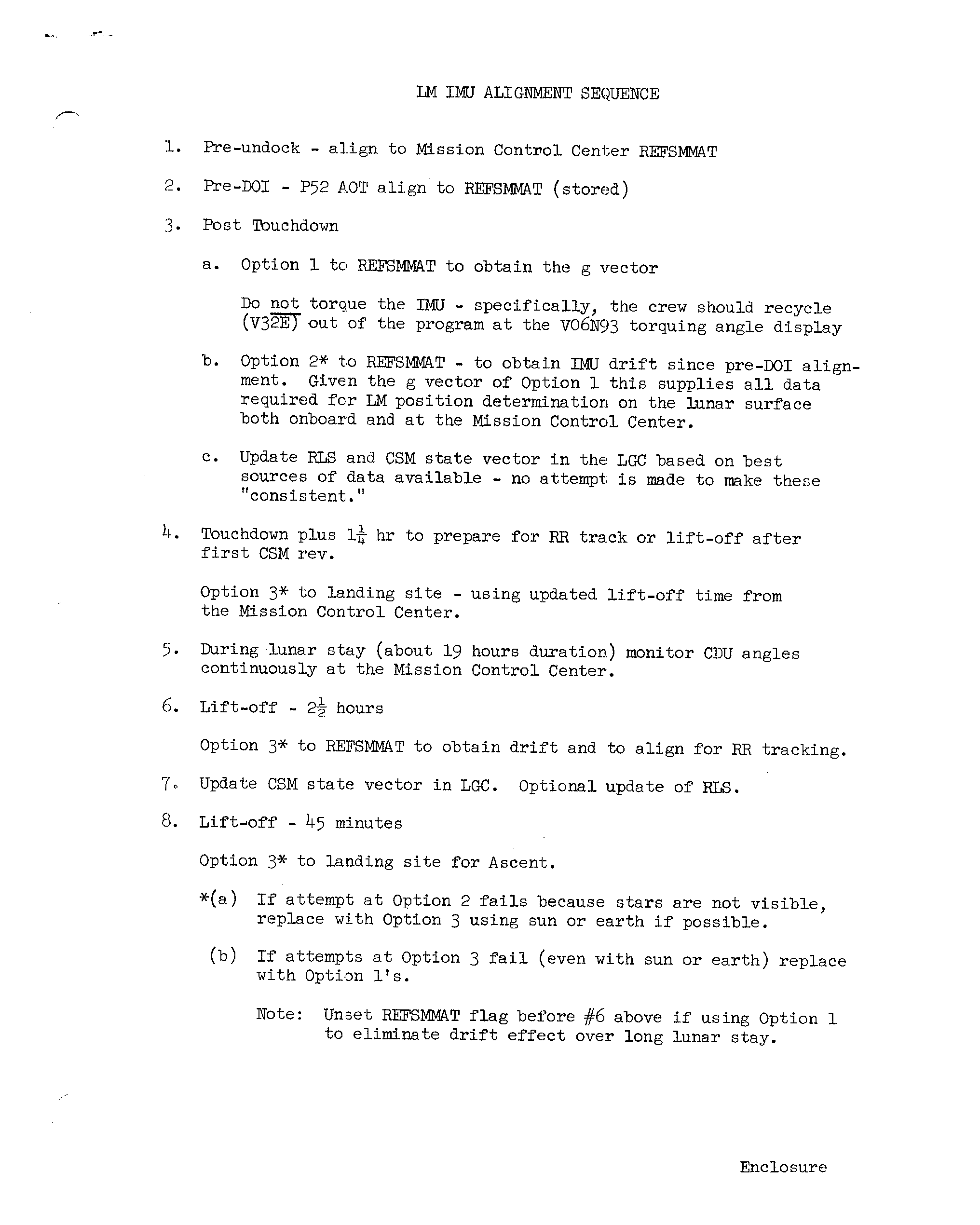
LM IMU ALIGNMENT SEQUENCE
1. Pre-undock – align to Mission Control Center REFSMMAT
2. Pre-DOI – P52 AOT align to REFSMMAT (stored)
3. Post Touchdown
a. Option 1 to REFSMMAT to obtain the g vector
Do not torque the IMU – specifically, the crew should recycle (V32E) out of the program at the V06N93 torquing angle display
b. Option 2* to REFSMMAT – to obtain IMU drift since pre-DOI align- ment. Given the g vector of Option 1 this supplies all data required for LM position determination on the lunar surface both onboard and at the Mission Control Center.
c. Update RLS and CSM state vector in the LGC based on best sources of data available – no attempt is made to make these “consistent.”
4. Touchdown plus 1¼ hr to prepare for RR track or lift-off after first CSM rev.
Option 3* to landing site – using updated lift-off time from the Mission Control Center.
5. During lunar stay (about 19 hours duration) monitor CDU angles continuously at the Mission Control Center.
6. Lift-off – 2½ hours
Option 3* to REFSMMAT to obtain drift and to align for RR tracking.
7. Update CSM state vector in LGC. Optional update of RLS.
8. Lift-off – 45 minutes
Option 3* to landing site for Ascent.
*(a) If attempt at Option 2 fails because stars are not visible, replace with Option 3 using sun or earth if possible.
(b) If attempts at Option 3 fail (even with sun or earth) replace with Option l's.
Note: Unset REFSMMAT flag before #6 above if using Option 1 to eliminate drift effect over long lunar stay.
- Mar 07, 1969 – G Lunar Surface stuff is still incomplete (4.2σ)
- Apr 17, 1969 – Reduction in Number of P52 Alignments During Apollo Missions (3.1σ)
1969_tindallgrams.pdf

tindallgrams01.pdf

tindallgrams02.pdf


